
1st Kinopy
初めて作ったKinopyです。

■身長
410mm
■体重
2390g
■アクチュエータ
JR PROPO DSR8801×12個
JR PROPO RBS5801×6個
JR PROPO RBS581×2個
JR PROPO DSR3801×2個
JR PROPO ES375×1個
■コントローラ
Vstone VS-RC003
Vstone VS-IX001×1
Vstone VS-IX007×1
Vstone VS-IX008×1
■センサ
超音波距離センサ×2
赤外線センサ×2
ジャイロセンサ・加速度センサ(VS-IX001)
■電池
リチウムポリマー7.4V 1320mAh
■構成素材
アルミ、カーボン、木材、樹脂等
■主な戦歴
2007.03.24 第11回ROBO-ONE 資格審査落ち
2007.09.15 第12回ROBO-ONE 予選24位
2007.09.16 第12回ROBO-ONE 本戦出場
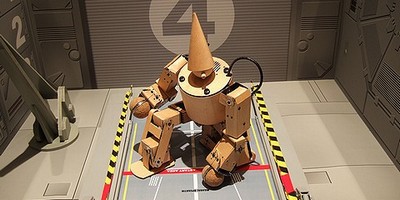
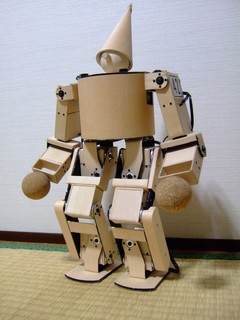
■特徴
とんがり帽子とまんまるボディ。
木で出来てるっぽいロボット。
■その他
外装はこんなのを貼ってます
Kinopyのできるまで
作り始めてから現在に至るまでの紆余曲折を紹介。
■2006/前半 きっかけ
知り合いが第9回ROBO-ONEに出るということで、試しに見に行ったら
一瞬でハマった。

とりあえず市販キットから始めようと思い、OmniZero.2に衝撃を受けた
こともあってRB1000を買った。
しばらくこれで遊びつつ大会やテクニカルカンファレンスに行った。
第10回ROBO-ONEも、見るためだけに長井まで行った。
見ているうちに、客席にいるのが恥ずかしくなってきた。
ステージではオリジナルのロボットを楽しそうに動かしている。
がんばれば自分でも作れるかもしれないのに、何もせずに
ただ見ているだけでいることに我慢ができなくなってきた。
■2006/後半 イメージ
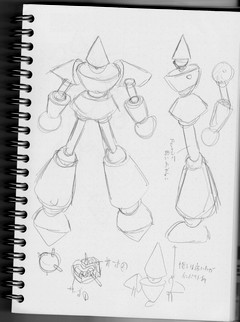
どんなものを作ろうかと、ラクガキしながらいろいろ考えてみる。
Kinopyはサーボケース等の現物合わせをしつつデザインしているので、
実はしっかりしたスケッチは無い。
この辺りが比較的近いかな?
上のイメージをそのまま立体にしたもの。

サーボのことを何も考えてない。
身長は60cm超えてるし、これではあんまりなのでボツ
■2007/1 デザイン
3D-CADを覚えるのが面倒だったので、厚紙と爪楊枝で形を作ってみる。
実際にサーボで組むときの、胴体や頭、手足のバランスや干渉具合の
チェックをする。
ここでの検討がキャラクターを決定付けるので非常に重要な作業。

初めの頃は糸で操るようなマリオネットのイメージもあったので、
手足が長い。
同時に外装も検討。木目にすることはかなり前から決めていた。
試しに薄いバルサ材を貼っている。
もろい上に曲げに弱かった。即却下。
■2007/2 製作
厚紙をアルミフレームに置き換えていく。
アルミの曲げ加工は初めてだったので失敗しまくりだったが、
失敗するほど上手くなっていくので、だんだん楽しくなってきたり。
いきなり全部を自作パーツにするのは大変なので、一部RB1000の
余りパーツを流用。腕はROBONOVAのプラケットを使用。

本当は自作ボードに挑戦したかったが、時間が無いのを言い訳に
市販のボードを使った。
RB1000を持っていたので、その流れでVS-RC003。
サーボはRBS5801と一部RBS581を使用。

胴体のフレーム。
CNCを持ってないので、こういう丸いフレームもすべてヤスリ1本で仕上げた。
大変だった。
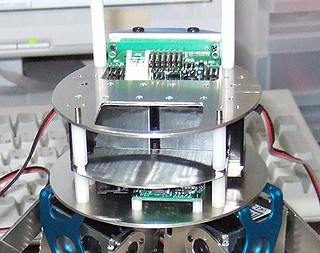
おなかのところにジャイロ基板が入っている。
一番奥に収まっているので、こいつのコネクタが抜けたら
エラいことになる。
・・・11月のロボファイト6で抜けたわけだが
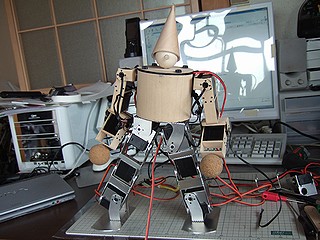
ジャイロの上にRB1000付属のニッケル水素6V・2000mAバッテリを搭載。
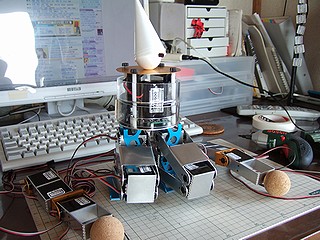
とりあえず形になった様子。

プレステの受信機がでかすぎて入らないので、PROBOで動かすことにした。
これで動かしてみたが、足が長すぎて不安定な上に手足が長すぎて
なにかちょっと違う気がする。
それにヒザを深く曲げるのがさっぱり似合わない。
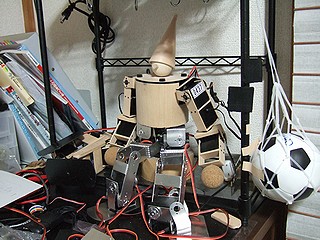
というわけで、手足をぎりぎりまで短くしてみた。
外装も貼ってみた。

外装がもろいのが気になるが、フレームむき出しに比べて
見違えるくらい良くなった。
これで第11回ROBO-ONEに参加。
■2007/3 第11回ROBO-ONE
当日はヒザのギア欠けに悩まされる。
RBS5801の樹脂ギアではもたない。
そもそも、外装を作るのに時間を掛け過ぎてモーションを作ってるヒマが
ないというまぬけなことやってしまった。
そして資格審査落ち。
どうしようかと思ったが、たまたま近くにいた杉浦さんにデザインを
褒められてもう少しやってみようかと思い直す。
■2007/4 初練習会
ROBO-ONEから一ヶ月後、初めて練習会に行った。
面識のない方々がほとんどだったが、隣の席のくぱくまさんが気軽に
声をかけてくれてうれしかった。
この1ヶ月の間に、軽くするためにヒザをシングルにしてバッテリを
ニッケル水素からリポへ変更していた。
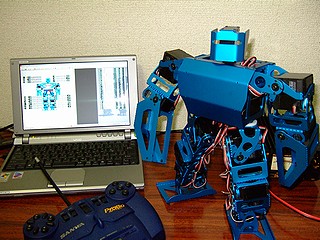
リポに変更して受信機格納スペースに余裕が出来たので、PROBOから
PS2コンへと変更した。
ギア欠けはなくなったものの、モーションがいい加減でまともに歩いていない。

モーションは作りこめばなんとかなるだろうと思っていたが、
初めて間近でクロムキッドを見て考えが変わった。
軽量級といえどこのスピードとパワー。客席で見ていたものとはまるで
迫力が違う。
現状ではいくらモーションを作りこんでも、これでは太刀打ちできない。
クロムキッドとやりあうためには、もっとパワーが要る。
と思い、脚のサーボをRBS5801からDSR8801へと変えることにした。
■2007/5 改造
耳無しRBS5801脚からの置き換えなので、できるだけコンパクトに
収めることにした。
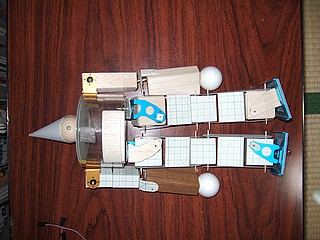
右脚が5801、左脚が8801。サイズはあまり変わらない
軸配置の検討中。
右脚はモモロール軸が上で、左脚はモモピッチ軸が上に来ている。
モモロール軸が上に来ている方が可動範囲が広いので機能的には
いいのだが、どうがんばっても見栄えがよくならない。
直立ではあまり変わらないが、脚を曲げるとその差は明らか。
モモピッチ軸が脚の付け根に見えてしまうので、この丸い胴体と
モモピッチ軸が離れると途端におかしくなる。
直行軸も試してみたが、座って脚を開くと後ろが引っ掛かるし、
何より横から見るとモモロール軸サーボのところまで胴体に見えて、
ひどく胴長短足な印象。小さいロボットに直行軸は似合わない。
結局、可動範囲には目をつぶって、見た目とお座りポーズをさせるために
この形↓にした。
お陰でバトルにはまったく向かないものになってしまった。
脚の長さは18.5cmしかないが、軸間は8cmあるので歩く分には
不自由しないはず。
早速歩かせてみる。
サーボのトルクにものを言わせてあっさり歩かせることができた。
今までの苦労はなんだったんだ・・・
■2007/6 改造の成果は・・
イーグルの練習風景?

ROBO-ONE SPECIAL CUPに出るつもりではりきって調整中。
しかし、はりきり過ぎたせいか人間の方の体調不良で断念。
■2007/7 わんだほー
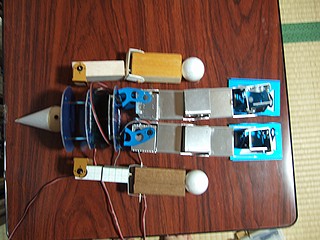
わんだほー直前。
脚に外装を貼ってきれいな状態。
サーボケースにもすべて貼った。
肩にはわんだほーのえんとりーNo.のゼッケン
この大会でようやくまともに動けるようになるも、今回そのままにしておいた
残りのRBS5801(主に腕)が脆いという欠点が判明。
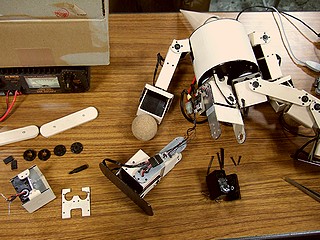
■2007/8 腕の改造
キャッチボールをするためのハンドの形状にかなり悩む。
失敗作

使うセンサーでも悩む。
シャープのPSDセンサが王道で回路も楽だが、センサの形状が
Kinoyのデザインに合わない。
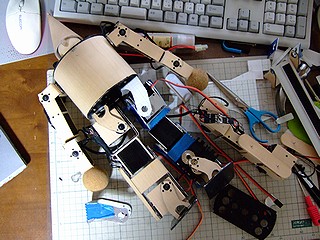
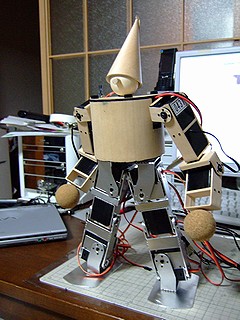
■2007/9 第12回ROBO-ONE
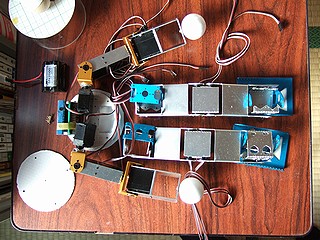
ROBO-ONE直前。
ぎりぎりになってなんとかハンドとセンサをつけられた。
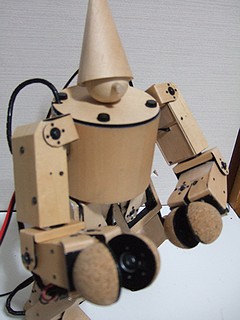
上腕のカバー内部

結局、浅草ギ研の超音波センサを使用。
センサだけ引っこ抜いて付けるというよくない使い方をしている
VS-RC003へは、PICでデューティを8bitデータに変換してデジタル拡張ボードへと
つないでいる。
腕が太くなった上デザイン的には微妙・・・
思ったよりも腕が重くなったので、念のため肩ピッチをRBS5801から
RBS5802に変更。
そして予選2日前。
夜が明けたら高松に出発しなければいけない。
キャッチボールの練習をしていたものの、腕が重くなったせいで
肩ピッチのRBS5802があっというまに壊れる。
ギアは無事だが、上ブタの軸受けが重さに耐えられない。
仕方ないので、急きょ肩ピッチをDSR8801に交換。夜中に慌ててフレームを作る。
置き換えやすい部位だったのがまだ救いか。
本番ではトラブルなく予選を通ってほっとする。
ただ、バトルの準備まで手が回らなかったのが残念。
■2007/10 キャラ付け
いろいろな方の提案により、声を出すべくスピーカを取り付けた。
VS-RC003の音声メモリの少なさに苦労する。
こっそりマノイの音声ボードを付けようかと思ったが載せるスペースが無い。
また、首が動かないのは不自然なので首ヨー軸追加。

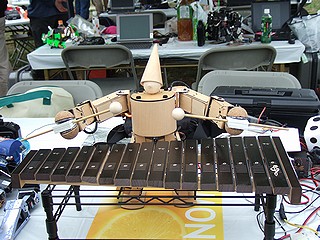
■2007/11 ヒト形
木琴をたたかせてみたり、
ロボファイトに向けてネタを仕込んでみたり(間に合わなかったが)、
ヒトの形をしているということを利用していろいろと試していた。
■2007/12 修理
イベントに出まくっていたツケが一気に来た。
フレームの歪み、断線、首折れが相次ぐ。
設計のまずさもあちこち見えてきた。
13回ROBO-ONE規格に合わせつつ、少しずつ改良すべく、検討中。。。
・・・つづく・・・